Rotate Vector by Quaternion
Introduction
Previously we were able to convert Euler angles to a Quaternion, and a Quaternion to a Matrix. In game programming we want fast 3D rotations, thus this lesson outlines how to rotate a vector by a Quaternion.
References
Matrix Method
Key Concepts
The key concepts of this part of the lesson are:
- Review of previous concepts:
- Create a Quaternion from Euler Angles
- Create a Matrix from a Quaternion
- Multiply a Vector by a Matrix
Review Concepts
From Lesson 2.5 we learned that a Quaternion can be created from Euler angles as follows:
Also, from Lesson 2.5 we learned that the conversion of a Quaternion to a matrix was done by:
From Lesson 2.1 we learned that a vector multiplied by a matrix was done by:
Substitution gives us:
Example Given the Euler angles of Roll = 5o, Pitch = -10o, and Yaw = 15o, the resulting Quaternion would be:
The matrix would be (rounded to 4 decimal places):
Now the final multiplication, given is:
Direct (Optimized) Method
The reference for this lesson outlines the following equation for multiplying a vector by a Quaternion:
The product of two Quaternions is given by (given the two quaternions A and B, where a Quaternion is defined as :
Also V must be treated like a Quaternion (i.e., ). The second reference goes through all the detail to get a faster method using the following steps:
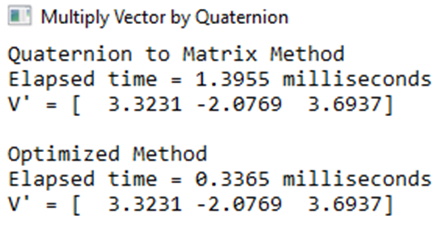
The reference stated it was faster, thus the following comparison was done:
Exercises & Assignments
Compare some previous calculations with this new method. This is the recommended approach for some of the calculations for Lab 2.